2014 Robot

I contributed significantly to the design and fabrication of our 2014 robot. The robot was designed to play the 2014 FRC game Aerial Assist. The game involved picking up and shooting a 2ft diameter exercise ball while coordinating with two other partner robots to maximise points.
Collector Design
I worked on the design for our 2014 collector mechanism to suck a 2ft diameter exercise ball into our robot and load it into our shooter. I lead the prototyping effort to figure out our design parameters and contributed to the geometry specifications of the collector. I worked on the design of the gearbox and motor assembly as well.
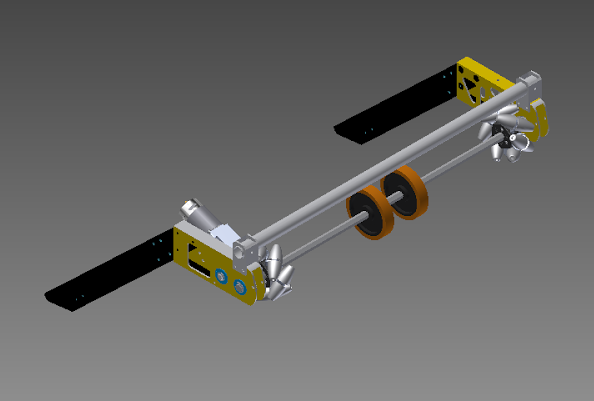
Ejector Design
In the middle of competition season, we found that in the middle of a match, when the ball was loaded into our robot’s shooter, we were unable to unload without firing the shooter if we decided we needed to pass instead of shooting. To alleviate this issue, I designed, machined and tested a pneumatic ejector mechanism to push the ball out of the robot shooter cradle even when it was loaded so we had the option to pass whenever we wanted too.
